
















- Changchun Rongde Optics
- Co.,Ltd.
- Add:No.1666 Yaan Road,
- North Lake Development District,
- Changchun 130102,China
- Tel:86-431-81881745
- Fax:86-0431-85256892
- E-mail:rongdecui@roundss.net
- Skype:adacui_roundss
Company News
Current position :Home > News > Company News
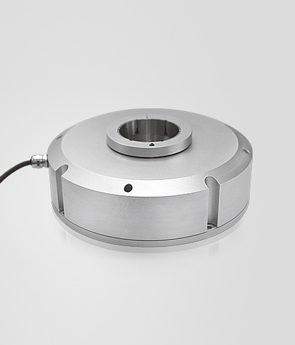
Absolute encoder in the application of the Robotic arm!
Changchun Rongde Optics Co.,Ltd. Release time:2018/8/20 Browse:1070In general, feedback on the position information of each dimension of the robot requires an absolute encoder to provide feedback. In high-precision robotic arm applications, such as semiconductor automated robotic robots, it is also possible to work with encoders to provide up to 30 positions of multi turn position information, providing the necessary feedback for precise control of the robot arm. For the encoder, it can detect the motion information of 12,000 rpm, and the response is very sensitive. Can be read by location information, calculate the mechanical parameters such as the rate of movement of the arm. For the moving position of the multidimensional robot arm, the absolute encoder can be read by the main controller when it is powered up, which has great advantages for the incremental encoder.
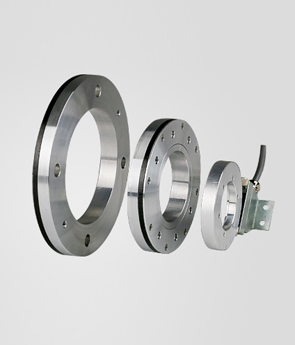
For the design of the robot arm, the encoder has high precision, high sensitivity, small size, modular design, etc. The absolute encoder can be better applied to it.
In the multi turn photoelectric absolute encoder application, since the position information does not require battery power or other storage, it can be easily read after the system is powered on. These advantages are unmatched by the incremental encoder. Absolute encoders are highly accurate, high sensitivity, fast response, small size, modular design, etc. They can be well used in gate opening control, robotic arm, and high precision position control components.
 Previous:Heavy duty overload encoder Next:Incremental encoder in the application of control smart textile machine
Previous:Heavy duty overload encoder Next:Incremental encoder in the application of control smart textile machine
 Products
Products